в московской школе
Система обработки видеопотока и данных положения в пространстве «ARGUS»
|
Работа – призёр открытой городской научно-практической конференции «Наука для жизни» в секции «Информационные технологии. Программирование. Кибернетика» среди работ учащихся 10−11 классов |
Направление работы: Информационные технологии, Программирование
Авторы работы: ГБОУ Школа № 1534
Email: Написать
Предметы: Физика, Математика, Информатика
Классы: 10 класс
Мероприятия: Открытая городская научно-практическая конференция «Наука для жизни» 2020 года
|
Актуальность
Система обработки видеопотока и данных положения в пространстве «ARGUS» разработана в интересах МЧС для организации поисково-спасательных работ на водной поверхности.
Благодаря своей универсальности может применяться для поиска любых объектов по заранее заданным параметрам и может быть установлена на любой носитель.
Цель
Организация обработки видеопотока и данных положения носителя бортовой аппаратной части системы в пространстве на наземном оборудовании с использованием самообучающейся нейронной сети
Оснащение и оборудование, использованное при создании работы
• Arduino Nano 3.0
• Logitech C270
• GPS модуль
• IMU-9 сенсор
• Датчик давления
• Raspberry PI-4
• Корпус
• Компьютеры с ОС LINUX
• Arduino IDE
• Python
• OpenCV
Описание
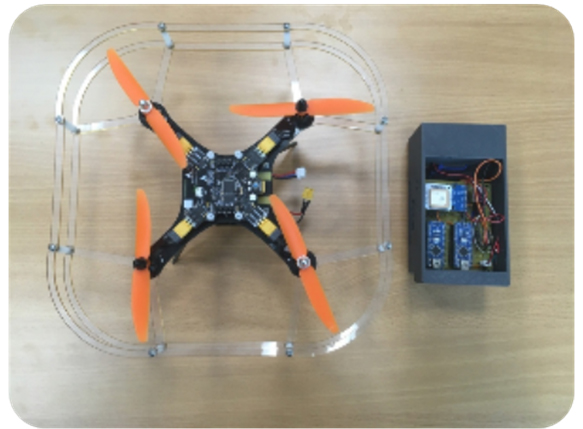
Для осуществления проекта автор использовал в качестве бортового компьютера плату Raspberry PI4. При её малых размерах она имеет характеристики, сравнимые с характеристиками среднего ноутбука: четырёхъядерный процессор, 4 ГБ ОЗУ. В качестве вспомогательных контроллеров автор использовал Arduino nano – достаточно известные контроллеры. Они справляются со своей задачей при относительно небольших размерах. Платы Arduino и RPI связаны между собой интерфейсом USB, RPI и обрабатывающий компьютер первоначально связаны локальной сетью, далее было установлено беспроводное соединение.
В качестве операционной системы автор выбрал Linux, нетребовательную к характеристикам систему с обширными возможностями в настройке. После соответствующей настройки система стала очень удобной для разработки: позволила настраивать автору параметры соединений и предоставила полный доступ к ресурсам для наших программ.
В качестве контролируемых параметров были выбраны высота, направление, скорость полета, а также положение в географических координатах. Они позволили автору узнавать крен, тангаж и курс прототипа носителя. Чтобы узнать высоту, автор использовал датчик давления, а для посадки – более точный лазерный дальномер. Аналогично лазерный дальномер используется для определения расстояния до объекта. Также установлен GPS трекер, который позволяет узнать координаты прототипа носителя.
Передача данных между вспомогательными контроллерами и бортовым компьютером осуществляется через COM порт. Затем данные передаются от бортового ПК на обрабатывающий ПК методом socket (метод соединения клиента с сервером).
Logitech C270 имеет разрешение 720p – достаточное для распознавания объектов. К сожалению, использовать это разрешение не удалось – в движении картинка сильно смазывалась, делая полет невозможным. Поэтому вместо разрешения 1280*720 автор использовал 640*480 – оно оказалась самым оптимальным.
На этапе разработки передачи видео автор столкнулся со следующей проблемой: в локальной сети видеопоток передавался без проблем, в глобальной же сети долго не удавалось настроить передачу. Для локальной сети использовалась утилита Motion, для приёма и обработки данных автор использовал OpenCv в Python. Для использования глобальной сети понадобилось приобрести статический IP-адрес, утилита Motion была заменена на собственную программу передачи видео, которая встроилась в основную программу обработки.
Результаты работы/выводы
В процессе выполнения работы нами был получен действующий прототип системы распознавания, работающий в локальной сети из двух компьютеров. Возможность использовать беспроводную сеть сделает проект мобильным. Система способна получать данные о положении в пространстве и с определённой вероятностью производит успешное распознавание лиц. Создан достаточно удобный для работы графический интерфейс. Создана платформа для размещения проекта, проведены успешные тесты проекта. Разработан план дальнейшей работы по совершенствованию проекта и расширению его функциональных возможностей.
Перспективы использования результатов работы
М2 – будущая модификация проекта. Оптимизация работы и разработка обратной связи позволят расширить возможности программы:
- создание приложения, удобного для использования;
- подключение базы данных с различными классификаторами (поиск не только лиц, но и, например, марок машин);
- установка беспроводной связи между устройствами;
- возможность управления носителем с помощью ПК пользователя.
Мнение автора
«Наш проект может применяться в широком диапазоне – от поисковых задач до охранных функций. Система, созданная с использованием локальной сети, может быть переведена на глобальную сеть. Вероятность распознавания лиц зависит от разрешения камеры: чем выше разрешение, тем больше точность; таким образом, программа работает успешно, а погрешность распознавания – аппаратная проблема. Аналогичная ситуация с погрешностью в точности датчиков телеметрии, которая зависит от качества датчика. В итоге мы достигли своей цели: создан действующий прототип системы распознавания объектов и бортовой телеметрии с использованием самообучающейся нейронной сети»