в московской школе
Модуль забора грунта
|
Работа призёра конкурса проектов и исследований «Наука для жизни» открытой городской научно-практической конференции «Наука для жизни» в секции «Машиностроение и транспорт. Робототехника» |
Направление работы: Робототехника, Космические технологии
Авторы работы: ГБОУ Школа № 1363
Email: Написать
Предметы: Физика, Информатика
Классы: 10 класс
Мероприятия: Конкурс проектов и исследований «Наука для жизни» открытой городской научно-практической конференции «Наука для жизни» 2021 года
|
Актуальность
Развитие космических технологий играет важную роль в жизни человека. С одной стороны, развиваются технологии, связанные с современностью: ракетостроение, спутникостроение, обслуживание существующих космических летательных аппаратов. А с другой стороны, существует ряд разработок, имеющих отношение к изучению спутников астероидов или планет. Развитие данного направления является актуальным, так как изучение ресурсов на небесных телах имеет непосредственное отношение к будущему нашей планеты и человечества.
В качестве предмета проекта выбрана разработка модуля для взятия образца грунта.
Цель
Разработать модуль, который позволяет производить забор песчаного грунта, осуществляет измерение показателей грунта (влажность, температура) и перемещает грунт в контейнер в зависимости от заданных параметров.
Задачи
1. Проанализировать имеющиеся варианты решения проблемы.
2. Спроектировать 3D-модель будущего механизма.
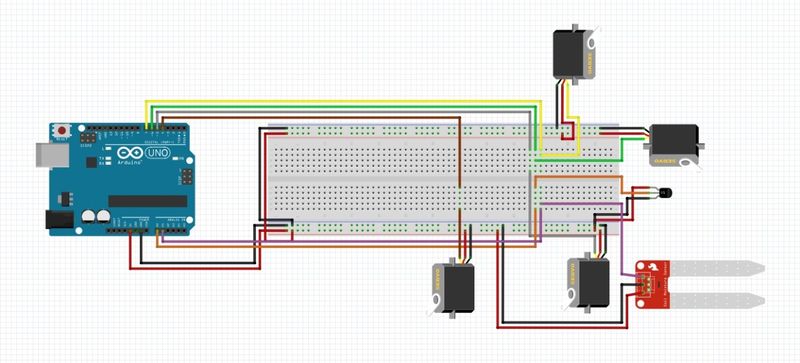
3. Разработать электрическую схему.
4. Разработать алгоритм работы модели.
5. Прописать программный код, осуществляющий работу сервоприводов.
6. Произвести отладку и интеграцию элементов, тестирование полученной модели.
Оснащение и оборудование, использованное в работе
• Fusion 360
• Материал – PLA-пластик для создания деталей модуля
• 3D-принтер FlyingBear Ghost 5
• Arduino Nano (1 шт.)
• Сервомотор sg90 (4 шт.)
• Датчик температуры LM35 (1 шт.)
• Датчик влажности почвы fc 28 (1 шт.)
• Программа Fritzing
Описание
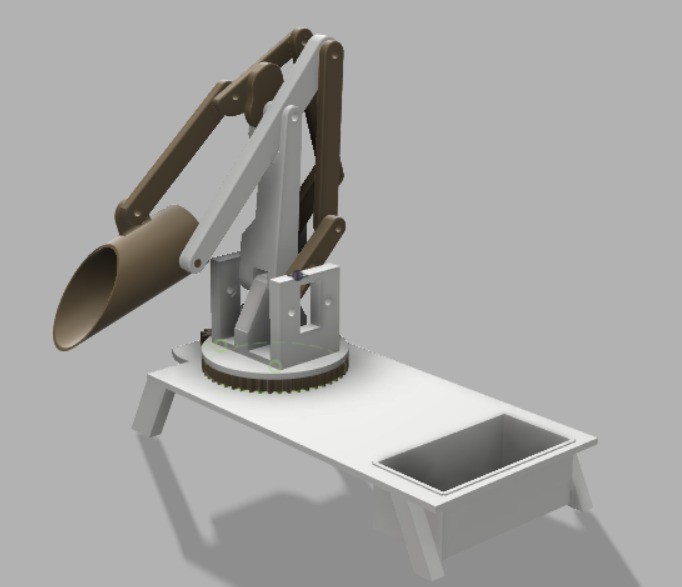
Разработка трёхмерной модели. Автором разработан эскиз и создан чертеж в программе Fusion 360. Конструкция стрелы манипулятора выполнена по аналогии со стрелой башенного крана и приводится в движение горизонтальной тягой (за счёт работы сервомотора). Ковш представляет собой цилиндр с вытянутым заострённым концом. Внутри ковша предполагается размещать датчики. На данном этапе отдельного внимания заслуживала доработка длин рычагов: данная работы выполнялась в несколько заходов.
Разработка электросхемы в программе Fritzing.
Создание прототипа. Для создания модели модуля забора грунта распечатали 15 деталей.
Кодирование сервоприводов и датчиков осуществлялось на языке программирования C.
Наиболее трудоёмким оказался этап интеграции. При интеграции вынуждены были внести изменения:
Произведена замена шагового мотора на сервомотор, так как выяснилось, что невозможно запрограммировать шаговый мотор таким образом, чтобы он полноценно выполнял свою задачу.
Выявлено неправильное соотношение шестерёнок: передаточное отношение (1:4) не удовлетворяло условию поставленной задачи и в результате длины дуги на 180⁰ не хватало для того, чтобы повернуть большую шестерёнку на 90⁰. Возникла необходимость пересчитать передаточное соотношение шестерёнок (1:2).
Результаты
1. В результате была разработана дееспособная модель модуля по забору песчаного грунта.
2. Модуль является статичным, для его передвижения необходимы дополнительные передвижные платформы.
3. Основанием модели является выполненная из PLA-пластика конструкция, на которой закреплены манипуляторы для забора грунта и контейнер для сбора образцов.
4. Ковш для забора грунта представляет собой ёмкость цилиндрической формы, выполненную по образцу пробоотборников (приборов для взятия образцов почвы и т. п.).
5. Манипулятор состоит из поворотного основания, на котором закреплена кран-балка. Манипулятор приводится в движение тремя сервоприводами, закрепленными на его основании: первый сервопривод приводит в движение центральную балку, второй приводит в движение коромысло-кран-балку, третий отвечает за движение (подъём и опускание) ковша.
6. Датчики (датчик измерения влажности и датчик измерения температуры) закреплены непосредственно в ковше. Работа датчиков и поворотных механизмов регулируется кодом, прописанным на языке C на базе среды разработки Arduino IDE.
При работе модуль забирает грунт, проводит измерение влажности и температуры взятого образца, сравнивает показатели взятого образца с заданными параметрами. Если образец не соответствует заданным параметрам, модуль возвращает образец на почву. Если образец соответствует заложенным в программе параметрам, механизм перемещает взятый образец в контейнер для хранения и дальнейшей транспортировки.
Вывод
Разработанный модуль забора грунта представляет собой экспериментальный образец, выполненный из доступных материалов (PLA-пластика).
Перспективы использования результатов работы
В перспективе предполагается доработка конструкции модели с точки зрения надёжности сохранения взятого материала (контейнер для перевозки взятого образца и ковш для взятия образца должны быть дополнены деталями, которые позволяли бы сохранять образец в том виде, в котором он был взят с поверхности) и улучшения внешнего вида модели с точки зрения эргономики. Предполагается дополнить модуль буровой установкой, которая позволит брать образцы грунта на большей глубине.