в московской школе
Применение стопошагающих механизмов конструкции П. Чебышева в условиях современного производства
|
Работа призёра открытой городской научно-практической конференции «Наука для жизни» в секции «Математика и механика» среди работ учащихся 10−11 классов |
Направление работы: Механика
Авторы работы: ОГБОУ «СОШ № 3 с УИОП г. Строитель»
Email: Написать
Предметы: Физика, Геометрия, Алгебра
Классы: 11 класс
Мероприятия: Открытая городская научно-практическая конференция «Наука для жизни» 2020 года
|
Актуальность
В настоящее время практически во всех промышленно развитых странах интенсивно ведутся работы по созданию и исследованию шагающих механизмов. В транспортной сфере это вызвано тем, что шагающие машины по сравнению с колёсными и гусеничными машинами имеют ряд преимуществ перед традиционными способами передвижения. Особенно это важно при движении по поверхностям со сложным рельефом, таким как пресечённая местность, завалы, а также внутри зданий и сооружений, где необходимо перемещаться по лестницам и узким коридорам и шахтам. В случаях, когда желательно или необходимо, чтобы след от опор целевой мобильной платформы имел дискретный характер, достойную замену шагающей машине найти невозможно.
Применение подобной конструкции не ограничено лишь решением вопросов передвижения. Подобные механизмы могут использоваться как элементы штампующих механизмов, а также в качестве элементов амортизирующих конструкций. Одними из самых известных, практически и математически обоснованных механизмов, являются механизмы Чебышева. В рамках работы были изучены его особенности с целью оценки потенциального применения в различных сферах человеческой деятельности.
Цель
Исследовать возможность применения стопошагающих механизмов конструкции П. Чебышева в условиях производства.
Задачи
- Изучение теоретических основ построения стопошагающих механизмов.
- Моделирование механизма.
- Анализ конструкции и выявление её достоинств и недостатков.
- Оценка потенциала промышленного применения конструкции.
Оборудование
- Измерительные приборы
- 3D-принтер
- САПР «Компас 3D»
Описание
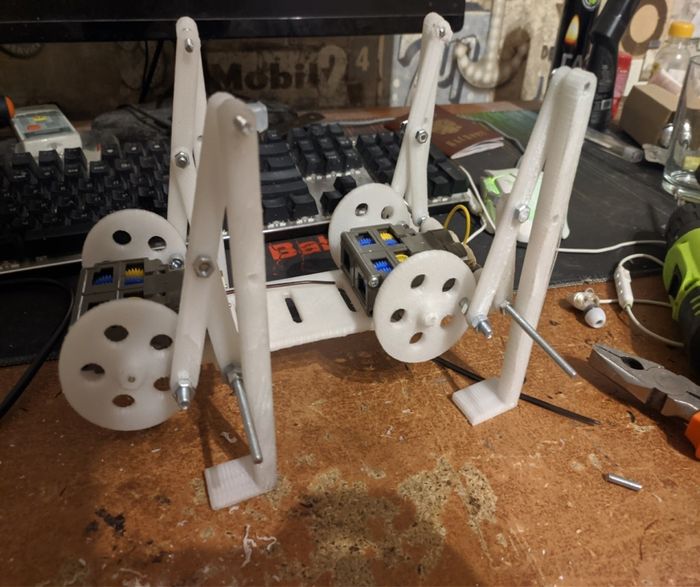
Разработку конструкции стопошагающего механизма условно можно разделить на 3 этапа: этап расчёта, этап моделирования и 3D-печать. Так как габаритные размеры механизма зависят от выбранной базовой величины L, то, учитывая возможности 3D-принтера, в качестве базовой была выбрана длина детали 2 см. В данном случае целесообразным оказалось придать базовой детали круглую форму для минимизации биения при вращении и избежания излишних нагрузок на соединительные части механизма. Используя данное соотношение, были смоделированы остальные элементы. Высота ноги со стопой фактически может быть произвольна.
В качестве материала 3D-печати использовался PLA пластик с заполнением модели 60% для достижения удовлетворительных показателей прочности конструкции и её массы. При печати использовалась технология FDM.
Ещё один важный параметр, принятый к сведению при моделировании, – это учёт размера двигателей с редукторами. Для передвижения механизма используются 2 редуктора с приводом из 4 моторов постоянного тока.
При проектировании была рассмотрена возможность использования одного мотора для приведения в движение всего механизма. Это возможно при использовании зубчато-ременной передачи между шкивами, насаженными на первичный вал. При этом прямой привод имеет только одна пара ног. Для этого в конструкцию базовой платформы на этапе проектирования были добавлены крепления под вал. Как следствие, необходима пересборка редуктора под другое передаточное соотношение.
Результаты работы/выводы
Целью практических испытаний устройства было выявить его существенные недостатки и наметить доработки для оценки потенциала использования. При ходовых испытаниях было выявлено, что для обеспечения нормального функционирования механизма требуется расширение его базы, так как из-за высокого центра тяжести может произойти опрокидывание. В результате тестов было выявлено, что для нормального функционирования механизма в качестве транспортной платформы необходима система программного управления, желательно работающая в совокупности с нейронной сетью, анализирующей маршрут и поверхность перед механизмом и вносящая поправки в управление на основе показаний датчиков. При проектировании механизма, обеспечивающего передвижение с низкой нагрузкой на грунт (за счёт увеличения площади стопы), очевидно, что необходимы двигатели, обеспечивающие большой крутящий момент, так как масса каждой из стоп и механизма в целом будет довольно высока.
При испытаниях было выявлено, что механизм без доработок может осуществлять только прямолинейное движение. Это в реальных условиях накладывает целый ряд ограничений в применении. Для решения этой проблемы рекомендуется использование сервоприводов либо гидроприводов большой мощности, позволяющих поворачивать части платформы с парами ног относительно друг друга на необходимый угол. Очевидно, что и здесь требуется управление контроллером либо компьютером.
В случае использования механизма как части привода клапанов или штампующих станков, стоит учесть, что во избежание люфта стопы и сохранения необходимой точности постановки стопы, помимо использования высококачественных подшипников для соединения подвижных частей необходимо применение направляющих. Ввиду применения подшипников в полноразмерных соединениях механизм будет достаточно тихим.
Стоит учесть, что при выполнении в больших габаритах данный механизм должен быть достаточно тихоходным, что компенсируется достаточно большой переносимой массой и низкой нагрузкой на грунт (механизм не оставляет глубокой колеи).
В целом, принципы, реализованные в данном механизме, могут применяться для решения производственных задач при условии внесения в конструкцию ряда озвученных изменений.