в московской школе
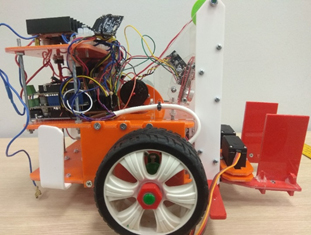
РОБОТ «ГОР» для дистанционного осуществления погрузочно-разгрузочных работ
|
Работа победителя открытой городской научно-практической конференции «Наука для жизни» в секции «Машиностроение и транспорт. Робототехника. Информационные технологии. Программирование. Кибернетика. Электроника и приборостроение» среди работ учащихся 7−9 классов |
Направление работы: Робототехника
Авторы работы: ГБОУ "Курчатовская школа", ГБОУ Школа № 1324
Email: Написать
Предметы: Информатика, Геометрия, Алгебра
Классы: 8 класс, 11 класс
Мероприятия: Открытая городская научно-практическая конференция «Наука для жизни» 04−05 апреля 2019 года
|
Актуальность
Одним из наиболее интересных направлений развития робототехники является решение задач механического перемещения грузов и манипуляции различными механизмами в условиях агрессивной внешней среды, не позволяющей проводить работы в присутствии человека. Примерами такого применения можно назвать:
- проведение подводных/глубинных работ;
- выполнение работ в условиях пониженных/повышенных температур или высокого давления;
- применение в условиях химического или радиационного заражения;
- применение в условиях космоса.
Российские наработки в области создания и применения робототехники и иных механизмов, работающих в экстремальных условиях, всегда были наиболее конкурентоспособными и успешными. Можно с уверенностью сказать, что данный сегмент всегда был и остаётся наиболее наукоёмким, требующим неординарных изобретательских решений и глубоких теоретических знаний во многих смежных областях науки, в том числе физике, химии, микробиологии.
Именно поэтому при реализации проекта была выбрана задача построения дистанционно управляемого робота, предназначенного для выполнения манипуляций с грузами. Выполнение данного проекта позволит получить навыки и опыт по решению задач проектирования платформы и манипулятора, программирования движения робота и дистанционного управления действиями манипулятора.
Цель работы: создание дистанционно управляемого робота, предназначенного для выполнения манипуляций с грузами.
Задачи
- Проектирование и прототипирование колёсной платформы робота и манипулятора.
- Конструирование колёсной платформы и манипулятора.
- Разработка электрических схем, сборка электросхемы робота.
- Разработка программного кода управления платформой и манипулятором.
- Разработка мобильного приложения для дистанционного управления.
- Тестирование робота.
Содержание работы
При реализации проекта была выбрана задача построения дистанционно управляемого робота, предназначенного для выполнения манипуляций с грузами. Выполнение проекта позволило получить навыки и опыт по решению задач проектирования платформы и манипулятора, программирования движения робота и дистанционного управления действиями манипулятора.
Работа по созданию робота для дистанционного осуществления погрузочно-разгрузочных работ (Робот «ГОР») предусматривала выполнение следующих этапов:
- проектирование и прототипирование элементов Робота «ГОР»;
- конструирование (сборка) элементов Робота «ГОР»;
- разработка электрических схем, сборка электросхемы робота;
- разработка программного кода управления платформой и манипулятором.
Выводы
Разработан действующий образец робота для дистанционного осуществления погрузочно-разгрузочных работ (Робот «ГОР»), успешно выполняющий поставленные перед ним задачи (функции):
- дистанционно управляемое движение по полигону;
- выполнение захвата и манипуляций с элементами, размещёнными по полигону;
- размещение элементов на полигоне на возвышенных участках или в несколько уровней.
Дополнительные функции:
- обработка данных световых индикаторов на маршруте;
- автономное прохождение размеченной трассы.
Оснащение и оборудование, использованное при создании работы
Для проектирования робота применялись следующие программное обеспечение и оборудование:
- рабочее место (ноутбук): asus-x555l;
- программное обеспечение: SOLIDWORKS 2016 x64 Edition. На этапе прототипирования использовались:
- аппаратно-программный комплекс 3D-моделирования 3D BIZon Prusa i3 Steel;
- аппаратно-программный комплекс лазерной обработки Raylogic 11G 530 лайт;
Перспективы использования результатов работы
Наиболее перспективным направлением развития робота является расширение его функциональных задач:
Сотрудничество с вузом/учреждением при создании работы
Национальный исследовательский технологический университет «МИСиС».
Награды/достижения
Победитель (1-е место) конкурса компетенций «Роботон МИР» 2017–2018 года;
Призёр (3-е место) Открытых состязаний роботов «Мой шаг в робототехнику. Новый формат» в номинации «Робот Arduino», ГБОУ Школа № 1537, 16 февраля 2019 г.
Особое мнение
«Разработанная платформа робота для дистанционного осуществления погрузочно-разгрузочных работ (Робот «ГОР») позволяет решать разнообразные задачи, что подтверждается фактом повторного использования робота на соревнованиях, условия которых не связаны с начальными целями и задачами создания робота.
Платформа позволяет проводить исследования как дополнительных элементов, так и программного обеспечения, может использоваться в учебном процессе.
Экспериментальным путём выявлено, что наиболее эффективнымдля решения задачи подъёма грузов для заданных условий является тросовая передача (лебёдка). Она обеспечивает необходимую плавность хода и точность позиционирования детали в пространстве. Эта модель и была реализована как основная с последующей настройкой плавности хода и точности захвата»
- автономное движение по маршруту;
- усложнение/добавление инструментов-манипуляторов;
- добавление инструментов диагностики факторов окружающей среды или измерительных приборов.